The Kalman Filter is an algorithm which helps to find a good state estimation in the presence of time series data which is uncertain. For example, when you want to track your current position, you can use GPS. However, GPS is not totally accurate as you know if you ever used Google Maps on your mobile device. Sensor data is noisy and the programmer and the users have to deal with it.
The GPS signal in space will provide a "worst case" pseudorange accuracy of 7.8 meters at a 95% confidence level.
Source: gps.gov, see also What is the maximum Theoretical accuracy of GPS?
The Kalman filter is the optimal linear filter (BLUE: Best Linear Unbiased Estimator). This means, there is no estimator for the state which has a linear state model which is better. It assumes the noise is Gaussian. If the noise is Gaussian, then the Kalman filter minimizes the mean squared error of the estimated state parameters. So it in this case it is not only the best linear filter, but the best filter. The name "filter" is used because the Kalman filter removes (filters) the noise.
Step-by-step
Step 1: Problem description
First, note what you're given. This should be:
- The type of data you measure $z \in \mathbb{R}^{n_z}$,
- the type of values you want to derive from that $\mathbf{x} \in \mathbb{R}^{n_x}$,
- the types of action $a_k \in \mathbb{R}^{n_a}$ you can do.
Step 2: Modelling
The Kalman Filter is a linear filter. This means you have to model your system in the form
$$\mathbf{x}_{k+1} = A_k \mathbf{x}_k + B_k a_k + r_k^{(s)}$$
with
- $\mathbf{x}{k+1}, \mathbf{x}$ being the state vectors,} \in \mathbb{R}^{n_x
- $A_k \in \mathbb{R}^{n_x \times n_x}$ being the system matrix,
- $B_k \in \mathbb{R}^{n_x \times n_a}$ being the control matrix,
- $a_k \in \mathbb{R}^{n_a}$ being the control matrix vector ($a$ for action),
- $r_k^{(s)} \sim \mathcal{N(0, C_k^{(r_s)})}$ with $C_k^{(r_s)} \in \mathbb{R}^{n_x \times n_x}$ being Gaussian noise. $C_k^{(r_s)} \in \mathbb{R}^{n_x \times n_x}$ is called the process error covariance matrix.
You can also make a model of your measurements. They should be some linear combination of the state with Gaussian noise $r_k^{(m)}$:
$$z_k = H \cdot \mathbf{x}_k + r_k^{(m)}$$
with
- $z_k \in \mathbb{R}^{n_m}$: The measurement vector
- $r_k^{(r_m)} \sim \mathcal{N(0, C_k^{(r_m)})}$ with $C_k^{(r_m)} \in \mathbb{R}^{n_m \times n_m}$ being Gaussian noise. $C_k^{(r_m)} \in \mathbb{R}^{n_m \times n_m}$ is called the measurment noise covariance matrix.
- $H \in \mathbb{R}^{n_m \times n_x}$: A matrix which transforms the state vector $\mathbf{x}$ to a measurement vector. This matrix is a constant over the whole process. It is most likely to have only 0s and 1s as entrys.
Step 3: The algorithm
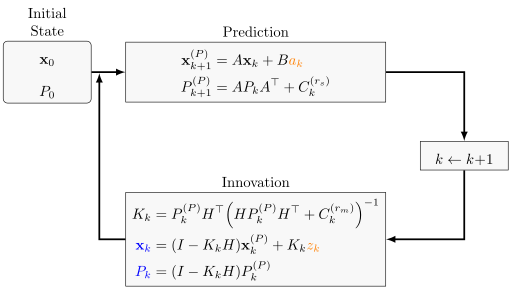
The inputs are orange, the outputs are blue.
The matrices which were not explained so far are:
- $P_k \in \mathbb{R}^{n_x \times n_x}$ is the state vector covariance matrix. It is the uncertainty.
- $K_k \in \mathbb{R}^{n_x \times n_m}$: The Kalman gain. Higher values indicate that we give more trust to the measurment. Lower values indicate that we give more trust to our last prediction. If the measurement uncertainty $C_k^{(m)}$ is small compared to the state uncertainty $P_k^{(P)}$, then the Kalman Gain is big. So we will rely more on the measurement and less of what we predicted before.
The complexity of the Kalman filter is $\mathcal{O}(n_z^{2.4} + n_x^2)$ According to Cyrill Stachniss. The factor $2.4$ comes from matrix inversion.
Example
Suppose you want to track the position of a car in 2D. What you get as sensor data is the current position. So the state is
$$\mathbf{x} = \begin{pmatrix}x\y\\dot{x}\\dot{y}\end{pmatrix}$$
where $x \in \mathbb{R}$ is the position in m away from some predefined point, $\dot{x} \in \mathbb{R}$ is the velocity in m/s at starting time and $\ddot{x} \in \mathbb{R}$ is the acceleration in $m/s^2$. The measurements are
$$\mathbf{z} = \begin{pmatrix}x^{(M)}\y^{(M)}\end{pmatrix}$$
What you get to choose is the acceleration at each time step $i$ (time steps have the length $t$):
$$a = \begin{pmatrix}\ddot{x}^{(a)}\\ddot{y}^{(a)}\end{pmatrix}$$
As the Kalman filter is a linear filter, the state model is:
$$\mathbf{x}^{(P)}_k = A\mathbf{x}_k + Ba_k$$
The measurement is dependent on the state, with some noise $r_k^m$:
$$\mathbf{z}_k = H \mathbf{x}_k + r_k^m$$
with $A \in \mathbb{R}^{4 \times 4}$, $H \in \mathbb{R}^{2 \times 4}$. As one can decompose the acceleration / speed in the directions and the equation for the new position is
$$\begin{align}x_{new}(t) &= x + \dot{x} t + 0.5 \ddot{x} t^2\ y_{new}(t) &= y + \dot{y} t + 0.5 \ddot{y} t^2\ \dot{x}{new}(t) &= \dot{x} + \ddot{x} t\ \dot{y}$$}(t) &= \dot{y} + \ddot{y} t\end{align
So given the state model, we get:
$$\mathbf{x}^{(P)} = \underbrace{\begin{pmatrix}1& 0 & t & 0\ 0& 1 & 0 & t\ 0& 0 & 1 & 0\ 0& 0 & 0 & 1\end{pmatrix}}{A_k} \mathbf{x}_k + \underbrace{\begin{pmatrix}0.5t^2 & 0\ 0 & 0.5t^2\ t & 0\ 0 & t\end{pmatrix}} \cdot a_k$$
The choice of the initial uncertainty covariance matrix $P_0 \in \mathbb{R}^{4 \times 4}$ / the initial state $\mathbf{x}$ doesn't matter too much. The Kalman filter algorithm will fix both over enough steps. Common choices are the zero-vector for $\mathbb{x}$ and $P_0 = c \cdot I$ as the covariance matrix with the identity matrix $I$ and $c$ being big compared with the noise.
For this example, a reasonable choice is the diagonal matrix $$P_0 = \begin{pmatrix}a_1 & 0 & 0 & 0\ 0 & a_2 & 0 & 0\ 0 & 0 & a_3 & 0\ 0 & 0 & 0 & a_4\end{pmatrix}$$ with $a_1 = a_2 = 20000000$ as the earths diameter is about $40000\textrm{ km}$ and $a_3=a_4=90$ as going more than $324\textrm{ km/h}$ is extremely rarely going to happen for a car.
For the initial state parameter, you could wait two time steps: $$\mathbf{x}0 = \begin{pmatrix}x^{(M)}\ y^{(M)}{-1}\ x^{(M)}} - x^{(M){-2}\ y^{(M)}$$} - y^{(M)}_{-2}\end{pmatrix
Prediction step
The state prediction works as above: $$\mathbf{x}^{(P)}{k+1} = A_k \mathbf{x} + B_k a_k$$
Covariance prediction:
$$P_{k+1}^{(P)} = A P_k A^T + C_k^{(r_s)} \quad \text{with}\quad C_k^{(r_s)} \in \mathbb{R}^{4 \times 4}.$$
The process error covariance $C_k^{(r_s)}$ expresses the error in the system. It is a covariance matrix and thus has to be symmetric and positive definite. It encodes errors in the modeling itself as well as errors in the actions.
Innovation step
Innovation, which compares the measurement with the prediction:
$$\tilde{y}{k+1} = z$$} - H \mathbf{x}^{(P)}_{k+1
The observation matrix $H \in \mathbb{R}^{2 \times 4}$ in the example is $$H = \begin{pmatrix}1 & 0 & 0 & 0\0 & 1 & 0 & 0\end{pmatrix},$$ as it encodes the relationship between the state and the measurement.
Innovation Covariance:
$$S_{k+1} = H P_{k+1}^{(P)} H^T + C_k^{(r_m)}$$
For the measurement error covariance $C_k^{(r_m)} \in \mathbb{R}^{2 \times 2}$ I have to know something about the way my sensors work. I guess this will usually be a diagonal matrix, as the sensors will be independent(?).
Kalman Gain:
$$K_{k+1} = P_{k+1}^{(P)} H^T S^{-1}_{k+1}$$
Now, finally the state and covariance update:
$$\mathbf{x}{k+1} = \mathbf{x}^{(P)}$$ $$P_{k+1} = (I - K_{k+1} H) P_{k+1}^{(P)}$$} + K_{k+1} \tilde{y
Miscallenious facts
Error estimates
How does the error estimate change in the Kalman filter steps?
In the prediction step, you have a matrix
$$\tilde{P} = A \cdot P \cdot A^T, \qquad A, P \in \mathbb{R}^{n \times n}$$
($A$ is the system matrix and $P$ is the estimate of the error.)
It has the property:
$$\det(\tilde{P}) = \det(A) \cdot \det(P) \cdot \det(A^T) = 2 \cdot \det(A) \cdot \det(P)$$
So if the determinant of $P$ is how we say if it gets bigger, then it will get bigger in the prediction step if $\det(A) > 0.5$. Otherwise, it might still get bigger as the system noise $C_{k}^{(s)}$ gets added.
In the filter step, things are more complicated. I don't know what to write about it, so I asked for help: How does the error estimate change in the Kalman filter?
Perfect sensor
What is the value of $K_k$ if the sensor is perfect?
A perfect sensor has no uncertainty. This means the variance $C_k^{(m)}$ is 0. It follows:
$$K_k = P_k^{(P)} H^T (H^T)^{-1} (P_k^{(P)})^{-1} H^{-1} = H^{-1}$$
This leads to the uncertainty $P_k$ getting 0 and the state $x_k$ will be the measurement $z_k$.
Really bad sensor
What is the value of $K_k$ if the sensor is as bad as possible?
If we don't trust the sensor at all, the uncertainty is huge. The inverse of a huge term is close to 0. so the Kalman gain $K_k$ is close to 0. This means neither the state $x_k$ nor the error estimate $P_k$ will change.
Notation
The system noise covariance matrix $C_k^{(r_s)}$ is often denoted with $Q$.
Alternative State Equation
Sometimes, the noise in the state equation is modelled in a different way:
$$\mathbf{x}_{k+1} = A_k \mathbf{x}_k + B_k a_k + G r_k^{(s)}$$
Then you also have to adjust the filter step to
$$P_{k+1}^{(P)} = A_k P_k A_k^T + G C_k^{(r_s)} G^T$$
See Why does it make sense to have noise of a different shape than the state vector?
Extensions
- EKF
- UKF: Unscented Kalman filter
- deterministic sampling
- approximation of the first two moments
- does not need derivative (in contrast to EKF)
Extended Kalman Filter
The Kalman filter is the best filter for linear systems, but if you have a non-linear system model
$$ \begin{align} x_{k+1} &= p_k(x_k, a_k) + r_k^{(s)}\tag{system model}\ z_k &= h_k(x_k) + r_k^{(m)}\tag{measurement model} \end{align} $$
it cannot be applied any more. But the Extended Kalman Filter linearizes the function around some point with multivariate Taylor Series expansions and uses LQR with a Kalman filter.
Assumptions:
- $p_k$ is differentiable.
- The non-linear part of $p_k$ in the environment of the linearization point is neglectable.
One linearizes around nominal values $\bar{x}_k, \bar{a}_k$.
$$p_k(x_k, a_k) \approx p_k(\bar{x}k, \bar{a}_k) + A_k (\underbrace{x_k - \bar{x}_k}}) + B_k (\underbrace{a_k - \bar{ak})$$
with Jacobian matrices:
$$A_k = \frac{\partial}{\partial x_k} p_k(x_k, a_k)|{x_k = \bar{x}_k, a_k = \bar{a}_k}$$
$$B_k = \frac{\partial}{\partial a_k} p_k(x_k, a_k)|k, a_k = \bar{a}_k}$$
$\Rightarrow$ Lineares Modell: $\Delta x \approx A_k \cdot \Delta x_k + B_k \Delta a_k$
mit $\Delta x_{k+1} = p_k(x_k, a_k) - p_k(\bar{x}_k, \bar{a}_k)$
Choice of nominal values $\bar{x}_k, \bar{a}_k$:
- Policy:
- Zielzustand $\bar{x}_k = x_+ = [0, \dots, 0]^T,\quad\bar{a}_k = [0, \dots, 0]^T\qquad\forall k$
- Zustandssolltrajektorien bei Verfolgungsproblem
- Prädiktiv: $\bar{x}_{k+1} = p_k(\bar{x}_k, \bar{a}_k)$ mit $\bar{x}_0 = E(x_0)$ und beliebig $\bar{a}_{0:N-1}$
- Iterativ: Starte mit beliebigem $\bar{a}_{0:N-1}$ und $\bar{x}_0 = E(x_0)$
- Bestimme $\bar{x}_{k+1} = p_k(\bar{x}_k, \bar{a}_k) \forall k$
- Linearisiere und löse LQR $\Rightarrow \bar{a}_k = \pi_k(\bar{x}_k)$
- zurück zu 1.
- Schätzer:
- Linearisierung um $\bar{x}_k = \hat{x}_k^l, \bar{a}_k=\pi_k(\hat{x}_k^l)$ $$\hat{x}^p_{k+1} = p_k(\hat{x}_k^l, \bar{a}_k)$$ $$C_{k+1}^P = A_k C_k^e A_k^T + C_k^w$$
- Filterschritt: Linearisierung um $\bar{x}_k = \hat{x}_k^p$ $$\hat{x}_k^e = \hat{x}_k^P + K_k (z_k - h_k(\hat{x}_k^P))$$ $$C_k^e = C_k^P - K_k H_k C_k^P$$
See also: Das Extended Kalman Filter einfach erklärt (German)
Lectures
There are several lectures at KIT which introduce Kalman filters:
- Probabilistische Planung
- Informationsfusion
- Lokalisierung mobiler Agenten
- Analyse und Entwurf multisensorieller Systeme
There is also an series of YouTube videos I can recommend:
Literature and Weblinks
- Bar-Shalom, Yaakov, X. Rong Li, and Thiagalingam Kirubarajan. Estimation with applications to tracking and navigation: theory algorithms and software. John Wiley & Sons, 2004.
- Greg Czerniak: Introduction to Kalman filters
- How do I choose the parameters of a Kalman filter?
- StackExchange: math, CV, DSP
- Python implementation