Behandelter Stoff
Vorlesung
| Datum | Kapitel | Inhalt |
|---|---|---|
| 15.04.2015 | Einleitung | - |
| 21.04.2015 | LVQ and related Techiques | k-Means, OLVQ1, kompetitives Lernen, Mode Seeker, PCA |
| 22.04.2015 | - | Übung |
| 28.04.2015 | Perceptron | - |
| 12.05.2015 | Auto-Encoder | Denoising- und Sparse Autoencoder, Bottleneck-Features, Kullback-Leibler-Divergenz; Kettenregel |
| 13.05.2015 | Deep Learning | Momentum, Rprop, Newbob, L1/L2-Regularisierung ($|w|$, $w^2$), weight decay |
| 19.05.2015 | Übung | - |
| 20.05.2015 | Übung | - |
| 26.05.2015 | SOM | Hebbian Learning, "VQ" mit SOM |
| 09.06.2015 | Effizientes Lernen | Paralleles Lernen; Quickprop; Alternative Fehlerfunktion (cross entropy, CFM); weight elimination / regularization |
| 15.07.2015 | Summary | When to use which objective function (cross entropy, MSE); Backpropagation; Weight initialization; Regularization (L2 weight decay, dropout); Time Delay NN; Recurrent Networks; Applications (Speech Recognition, Computer Vision) |
NN01-Intro.pdf
- Human Brain vs. Computer (Processing/Processors, Accuracy, Speed, Hardware, Design)
- Aufbau eines biologischen Neurons (vgl. Wikipedia)
NN02-Classification.pdf
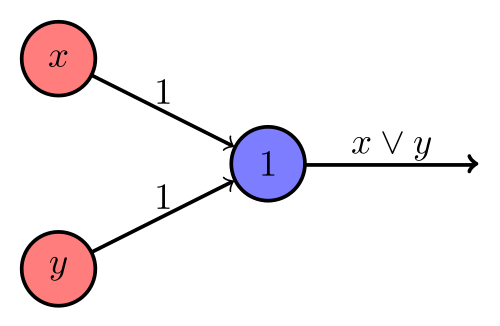
- McCulloch-Pitts Neuron (weights, bias, activation function is step function)
- Rosenblatt Perceptron Algorithmus
- Backpropagation
- Curse of Dimensionality
- Parzen Window
- Features: Nominal, Ordinal, Intervallskaliert, Verhältnisskaliert
- Bayes-Rule
- Given events $A_1$, $A_2$ and $B$, Bayes' rule states that the conditional odds of $A_1:A_2$ given $B$ are equal to the marginal odds of $A_1:A_2$ multiplied by the Bayes factor or likelihood ratio $\Lambda$: $$O(A_1:A_2|B) = \Lambda(A_1:A_2|B) \cdot O(A_1:A_2) ,$$ where $$\Lambda(A_1:A_2|B) = \frac{P(B|A_1)}{P(B|A_2)}.$$
- Parametrischer Klassifizierer
- Ein Klassifizierer heißt parametrisch, wenn er eine Wahrscheinlichkeitsverteilungsannahme macht.
- Naiver Bayes-Klassifikator
- Ein Klassifizierer heißt naiver Bayes-Klassifikator, wenn er den Satz von Bayes unter der naiven Annahme der Unabhängigkeit der Features benutzt.
- Normalverteilung
- Eine stetige Zufallsvariable $X$ mit der Wahrscheinlichkeitsdichte
$f\colon\mathbb{R}\to\mathbb{R}$, gegeben durch
$f(x) = \frac {1}{\sigma\sqrt{2\pi}} e^{-\frac {1}{2} \left(\frac{x-\mu}{\sigma}\right)^2}$
heißt $\mathcal N\left(\mu, \sigma^2\right)$-verteilt, normalverteilt mit den Erwartungswert $\mu$ und Varianz $\sigma^2$. - Multivariate Normalverteilung
- Eine $p$-dimensionale reelle Zufallsvariable $X$ ist normalverteilt mit Erwartungswertvektor $\mu$ und (positiv definiter) Kovarianzmatrix $\Sigma$, wenn sie eine Dichtefunktion der Form $$f_X(x)=\frac{1}{ \sqrt{(2\pi)^p \det(\Sigma)} } \exp \left( -\frac{1}{2}(x-\mu)^{T}\Sigma^{-1}(x-\mu) \right)$$ besitzt. Man schreibt $$X\sim \mathcal N_p(\mu, \Sigma).$$
- Gauß'scher Klassifizierer
- Ein (naiver) Bayes-Klassifikator, welcher von normalverteilten Daten ausgeht heißt Gauß'scher Klassifizierer.
- Principal Component Analysis (PCA, Hauptkomponentenanalyse)
- Die Hauptkomponentenanalyse ist ein Verfahren zur Dimensionalitätsreduktion von ungelabelten Daten im $\mathbb{R}^n$. Sie projeziert die Daten auf diejenige Hyperebene im $\mathbb{R}^d$, die den durch die Projektion stattfindenden Datenverlust minimal hält. Dabei ist $d \in 1, \dots, n$ beliebig wählbar. Die Transformation der Daten $X$ findet durch eine Matrixmultiplikation $Y = P \cdot X$ statt. Die Matrix $P$ besteht aus den ersten $d$ Eigenvektoren der Kovarianzmatrix der Features $X$: $P = (v_1, \dots, v_d)$ mit $\lambda_j v_j = C_X v_j$ für $j=1,\dots,d$ Außerdem gilt: $C_X = \frac{1}{n-1} X X^T$
V03: LVQ
Slide name: V03_2015-04-21_LVQ.pdf
- k-Means
- Fuzzy k-Means
- Vector Quantization (VQ) is an unsupervised clustering algorithm
- Learning Vector Quantization is supervised.
V04: Perceptron
Slide name: V04_2015-04-28_Perceptron.pdf
- McCulloch–Pitts (MCP) Neuron
- Ein MLP-Neuron is ein Algorithmus zur binären Klassifizierung. Er hat $m+1$, mit $m \in \mathbb{N}_{> 0}$ inputs $x_i \in \{0, 1\}$. Davon ist der erste (nullte) Konstant gleich Eins und wird Bias genannt. Jeder Input wird mit eingem Gewicht $w_i \in \mathbb{R}$ multipliziert, alle gewichteten Inputs werden addiert und schließlich wird die Stufenfunktion $\varphi(x) = \begin{cases}1 &\text{falls } x > 0\\0 &\text{sonst} \end{cases}$ angewendet. Man lernt mit MCP Neuronen, indem man $$\Delta w = \eta \delta x$$ $$w \gets w + \Delta w$$ berechnet, wobei $\eta \in (0, 1)$ die Lernrate ist, $x$ ein Trainingsdatum und $\delta = y_{\text{target}} - y$ die Abweichung vom gewünschten Ergebnis ist. Diese Regel wird auch Perceptron Learning Rule genannt.
- Rosenblatt-Perzeptron
- Wie das McCulloch–Pitts (MCP) Neuron, nur ist $x_i \in \mathbb{R}$ und ein Lernalgorithmus ist gegeben. Dieser addiert den $\eta \in (0, 1)$ gewichteten, fehlklassifizierten Vektor auf die Gewichte $w_i$. $\eta$ heißt die Lernrate. Man lernt mit MCP Neuronen, indem man $$\Delta w = \eta \delta x$$ $$w \gets w + \Delta w$$ berechnet, wobei $\eta \in (0, 1)$ die Lernrate ist, $x$ ein Trainingsdatum und $\delta = - \frac{\partial E}{\partial w}$ der Gradient auf der Fehleroberfläche in Abhängigkeit von den Gewichten ist. Es wird also Gradient descent verwendet.
- Pocket Perceptron Algorithm
- Ein Lernalgorithmus für ein Rosenblatt-Perzeptron. Dieser konvergiert zu Gewichten, welche die wenigsten Beispiele falsch klassifiziert.
- Sigmoid-Funktion
- $\varphi(x) = \frac{1}{1+e^{-x}}$
- Softmax-Funktion
- $\varphi(a_i) = \frac{e^{a_i}}{\sum_{k} e^{a_k}}$ wobei $a_i$ die Aktivierung des $i$-ten Neurons der selben Schicht ist.
- Perzeptron / Logistic Neuron
- MSE + Sigmoid activation function
Fakten:
- Das Rosenblatt-Perzeptron findet eine lineare Trenngrenze, wenn sie existiert.
- Probleme vom Rosenblatt-Perzeptron:
- Nicht-linear trennbare Daten wie z.B. das XOR-Problem
- Nicht-trennbare Daten
- Wahl der Lernrate und der Startgewichte
- Aufbau eines biologischen Neurons (Axon, Dendriten, Zellkörper, Ranviersche Schnürringe, Synapsen)
- Glia-Zellen
V05: Features
Slide name: V05_2015-04-29_Features.pdf
- Rectified Linear Unit (ReLU)
- $\varphi(x) = \max(0, x)$
- Leaky ReLU
- $\varphi(x) = \max(0.01x, x)$
- Softplus
- $\varphi(x) = \log(1 + e^x)$
- Feed Forward Neural Network
- A Feed Forward Neural Network is a learning algorithm which takes a fixed-size input feature vector, applies varous matrix multiplications and point-wise non-linear functions to obtain a fixed-size output vector.
- Multilayer Perceptron
- A Multilayer Perceptron is a special type of Feed Forward Neural Network.
It consists of fully connected layers only.
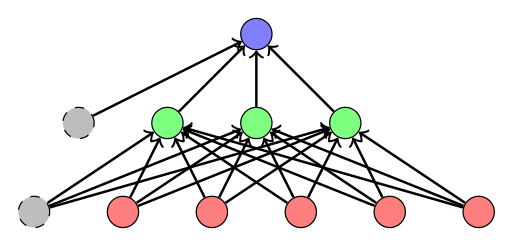
Figure 1: Draft of multilayer Perceptron (MLP). The bias units are grey, the input units are red, the hidden units are green and the output unit is blue. The edges are directed from input, to hidden, to output and from the bias to hidden / output. - Metrik
- Sei $X$ eine Menge und $d:X \times X \rightarrow \mathbb{R}$ eine
Abbildung. $d$ heißt Metrik auf $X$, wenn gilt:
- $d(x, y) = 0 \geq x=y \;\;\; \forall x, y \in X$
- $d(x,y)=d(y,x)$
- $d(x,y) \leq d(x,z) + d(z,y)$
- Jaccard-Metrik
- Es seien $A, B$ Mengen und $J(A, B) := \frac{|A \cup B| - |A \cap B|}{|A \cup B|}$. Dann heißt $J$ die Jaccard-Metrik.
- Levenshtein-Distanz
- Es seien $a, b$ Zeichenketten, $|a|$ die Länge der Zeichenkette $a$ und $\delta_{a_i \neq b_j}$ genau dann 1, wenn das $i$-te Zeichen von $a$ und das $j$-te Zeichen von $b$ sich unterscheiden. Dann heißt $d_L(a, b)$ die Levenshtein-Distanz: $$d_L(a,b) := lev_{a,b}(|a|, |b|)$$ $$\text{lev}_{a,b}(i, j) = \begin{cases}\max(i,j) &\text{falls} \min(i,j) = 0,\\ \min \begin{cases}\text{lev}_{a,b}(i-1,j)+1\\ \text{lev}_{a,b}(i,j-1)+1\\ \text{lev}_{a,b}(i-1,j-1)+\delta_{(a_i \neq b_j)}\\\end{cases} &\text{sonst}\end{cases}$$

Fragen:
- Welche Feed Forward Neuronalen Netze existieren, die keine Multilayer
Perceptronen sind?
→ CNNs, TDNNs, SOMs. - Welche Skalentypen gibt es für Merkmale (Features)?
- Nominale Merkmale: Nur Gleichheit kann überprüft werden
- Ordinale Merkmale: Es existiert eine "kleiner gleich"-Relation
- Intervallskalierte Merkmale:
- Die Differenz der Merkmale hat eine Semantik
- Es existiert jedoch kein "wirklicher" Nullpunkt
- Verhältnisskalierte Merkmale: Wie Intervallskaliert, aber mit absolutem Nullpunkt.
V06: Backpropagation
Slide name: V06_2015-05-05_Backpropagation.pdf
- Kreuzentropie Fehlerfunktion (Cross-Entropy)
- $$E_{-x} = - \sum_{k}[t_k^x \log(o_k^x) + (1-t_k^x) \log (1- o_k^x)]$$ wobei $x$ der Feature-Vektor ist, $k$ ein Neuron des letzen Layers, $t$ der wahre Wert (d.h. der gewünschte Output), $o$ der tatsächliche Output ist.
- Stochastic Gradient Descent
- Batch Gradient Descent
V07: Feature Learning
Slide name: V07_12-05-2015_Feature_Learning.pdf
- Autoencoder
- Ein Autoencoder ist ein neuronales Netz, welches darauf trainiert wird die Input-Daten am Output wieder zu replizieren.
- Bottleneck Features
- Unter Bottleneck-Features versteht man eine Schicht in einem neuronalem Netz, welche wesentlich kleiner ist als die vorhergehende und nachfolgende Schicht.
- Kullback-Leibler-Divergenz
- Die Kullback-Leibler-Divergenz ist ein Maß für die Unterschiedlichkeit zweier Wahrscheinlichkeitsverteilungen $P, Q$. Für diskrete Verteilungen ist sie definiert als: $$KL(P||Q) := \sum_{x \in X} P(x) \cdot \log \frac{P(x)}{Q(x)}$$
- Denoising Autoencoder
- Ein Autoencoder, welcher trainiert wird rauschen zu entfernen.
Fakten:
- Eine lineare Aktivierungsfunktion wird in einer Repräsentation im Bottleneck-Feature resultieren, die PCA ähnelt.
- Fehlerfunktion:
- CE bei binären Ausgaben (d.h. Input-Features)
- MSE bei reelen Ausgaben (d.h. Input-Features)
Fragen:
- Wie muss man die Grafik zu Stacked Denoising Autoencodern verstehen?
V08: Deep Learning
Slide name: V08_2015-05-13_Deep_Learning.pdf
- Deep Neural Networks
- Neural Networks with at least two hidden layers with nonlinear activation functions.
- Hyperparameter
- Hyperparameter $\theta$ eines neuronalen Netzes sind Parameter, welche nicht gelernt werden.
- Learning Rate Scheduling
- Start with a learning rate $\eta$ and reduce it while training.
- Exponential Decay Learning Rate
- $\eta_t = \eta_{t-1} \cdot \alpha = \eta_0 \cdot \alpha^t$ mit $\alpha \in (0, 1)$
- Performance Scheduling
- Measure the error on the cross validation set and decrease the learning rate when the algorithm stops improving.
- RProp
- RProp is a learning rate scheduling method which is only based on the sign of the gradient. It increases the learning rate when the sign of the gradient doesn't change and decreases or resets it when the sign of the gradient changes. Rprop has an own learning rate for every single feature.
- AdaGrad (vgl. Folie 34)
- $$\eta_{tij} = \frac{\eta_0}{\sqrt{1 + \sum_k {(\frac{\partial E^{t-k}}{\partial w_{ij}})}^2}}$$ where $\eta_0$ is an initial learning rate, $t$ is the epoch, $i,j$ refer to neurons.
- Newbob Scheduling
- Newbob scheduling is a combination of exponential decay learning rate scheduling and performance scheduling. It starts with a learning rate $\eta_0$. When the validation error stops decreasing, switch to exponentially decaying learning rate. Terminate when the validation error stops decreasing again.
- Cross Entropy Error function (CE)
- $$E_{CE}(w) = - \sum_{x \in X} \sum_{k} [t_k^x \log(o_k^x) + (1-t_k^x) \log(1-o_k^x)]$$ where $w$ is the weight vector, $X$ is the set of training examples (feature vectors), $t_k^x = \begin{cases}1 &\text{if } x \text{ is of class }k\\0&\text{otherwise}\end{cases}$ and $o_k^x$ is the output at neuron $k$ of the network for the feature vector $x$.
- Mean Squared Error function (MSE)
- $$E_{MSE}(w) = \frac{1}{2}\sum_{x \in X} \sum_{k} (t_k^x - o_k^x)^2$$ where $w$ is the weight vector, $X$ is the set of training examples (feature vectors), $k$ is the range of output neurons, $t_k^x = \begin{cases}1 &\text{if } x \text{ is of class }k\\0&\text{otherwise}\end{cases}$ and $o_k^x$ is the output at neuron $k$ of the network for the feature vector $x$.
- Convolutional Neural Networks (CNNs)
- Feed-Forward Neuronale Netze, welche durch geteilte Gewichte (weight sharing) grafische Filter lernen. CNNs sind aktuell in der Computer Vission Stand der Technik.
- Time-Delay Neural Networks (TDNNs)
- TDNNs wenden wie CNNs weight sharing an um Filter zu lernen. Sie werden in der ASR verwendet und lernen auch Filter. Allerdings wird hier über die Zeit hinweg gefaltet.
- Multi-State Time-Delay Neural Networks (MS-TDNNs, siehe [Haf92])
- MS-TDNNs codieren die alignment-Suche im Netzwerk. Sie sind hybride Netze (so wie HMM-DeepNN Hybrids von Mircosoft).
- Pretraining
- Design choices (hyperparameters):
- Topology (Width of layers, number of layers)
- Activation functions
- Error function
- Mini-Batch size
- Training function
- Preprocessing
- Initial Weights
- MSE vs CE:
- MSE penetalizes large differences much more than small ones
- MSE works well for function approximation
- CE works well on classification tasks
V09: Reinforcement Learning
Slide name: V09_2015-05-26-Reinforcement-Learning.pdf
- Markov Decision Process (MDP)
- Siehe ML 1.
- Diskontierungsfaktor
- Siehe Probabilistische Planung.
- Strategie (engl. Policy)
- Siehe Probabilistische Planung.
- Q-Funktion (Action-Value function)
- Siehe Probabilistische Planung.
- V-Funktion (State-Value function)
- Siehe ML 1.
- $\varepsilon$-Greedy Strategy
- Siehe Probabilistische Planung.
- $\varepsilon$-decreasing Strategy
- Siehe Probabilistische Planung.
- $\varepsilon$-first Strategy
- Siehe Probabilistische Planung.
- Adaptive $\varepsilon$-greedy Strategy
- Siehe Probabilistische Planung.
- Episode
- Siehe Probabilistische Planung.
- Monte Carlo Policy Evaluation
- Initialize state values $V^\pi$ and iterate:
- Generate an episode
- foreach state $s$ in episode:
- Get the reward $\hat{R}$ from that state on
- $\hat{R} = \sum_{j=0}^\infty \gamma^j r_j$
- $V_{k+1}^\pi (s) \leftarrow V_k^pi (s) (1-\alpha)+\alpha \hat{R}$
- Temporal Difference Learning (TD-Learning)
- Siehe ML1
- Q-Learning
- Siehe Probabilistische Planung.
- SARSA
- Siehe Probabilistische Planung.
- Strategie-Iteration (Policy iteration)
- Siehe Probabilistische Planung.
Konvention:
- Eine optimale Strategie wird mit $\pi^*$ bezeichnet.
Fragen:
- Was bedeutet es, wenn in einem MDP der Diskontierungsfaktor
$\gamma = 0$
ist?
→ Nur der aktuelle Reward ist wichtig. Effektiv nimmt der Agent immer das nächste Feld, welche den höchsten Reward bietet (bzw. die Aktion, die den größten 1-Aktion Erwartungswert liefert). - Was bedeutet es, wenn in einem MDP der Diskontierungsfaktor
$\gamma = 1$
ist?
→ Der Agent versucht die Summe der Belohnungen insgesamt zu maximieren.
Siehe auch:
V10: SOM
Slide name: V10_2015-05-26_SOM.pdf
- Hebbsche Lernregel
- what fires together, wires together
- Selbstorganisierende Karten (SOM, Kohonennetze)
- SOMs sind eine Art von Neuronalen Netzen. Die neuronen von SOMs sind
auf einem Gitter angeordnet. Es gibt nur zwei Schichten: Die Input-Neuronen
und die Neuronen auf dem Gitter. Jedes Input-Neuron ist mit jedem Neuron
auf dem Gitter verbunden.
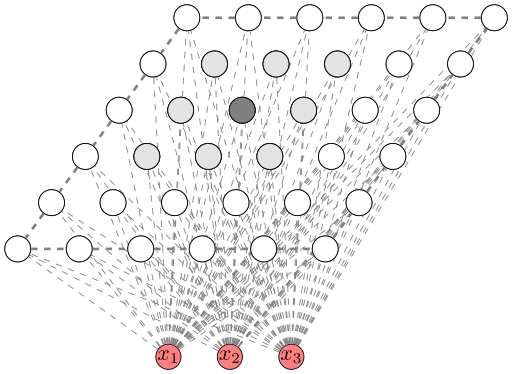
Figure 2: Draft of self-organizing map (SOM). - Initialisierung: Die Gewichte $w_{ji}$ von dem $i$-ten Input-Neuron zum Neuron ($i = 1, ..., n$) $j$ auf dem Gitter werden zufällig initialisiert.
- Sampling: Nehme ein zufälliges Beispiel $x$ der Trainingsdaten.
- Matching: Finde das Neuron
$j_{\text{min}}$, für das die Gewichte
dem Input am ähnlichsten sind:
$$j_{\text{min}} = \text{arg min}_j \sum_{i=1}^n (x_i - w_{ji})^2$$
- Update: Passe die Gewichte des gewinnenden Neurons $i$ sowie der Nachbarschaft $j$ an: $w_j = w_j + \eta h(j, i(x))(x - w)$
- Repeat: Und zurück zu Schritt 2.
- Uwe Schneider: Self Organizing Map - ein Demonstrationsbeispiel, 2001.
- Self-Organizing Maps with Google’s TensorFlow
- J. A. Bullinaria: Self Organizing Maps: Fundamentals, 2004.
- Kohonen's Self Organizing Feature Maps by ai-junkie

V11: RBMs
Slide name: V11_2015-05-27_RBMs
- Hopfield-Netz (siehe [Hop82], [Kri05])
- Ein Hopfield-Netz besteht nur aus einer Schicht von McCulloch-Pitts
Neuronen. Jedes Neuron ist mit jedem anderen Neuron (also nicht sich
selbst) und allen Inputs verbunden. Die Schicht funktioniert
gleichzeitig als Ein- und Ausgabeschicht.
Hopfield-Netze werden in einem einzigen durchgang Trainiert. Dabei wird
auf das Gewicht von Neuron $i$ zu Neuron $j$ + 1 addiert, wenn
das Bit $i$ des Trainingsmusters gleich ist. Falls das nicht der Fall
ist, wird von dem Gewicht 1 subtrahiert:
$$w_{ij} = \sum_{p} (2 a^{(i)}_p - 1) \cdot (2 a^{(j)}_p - 1)$$
Jedes Gewicht ist zum start des Trainings 0. Das Training ist also
einfach nur ein Zählen, wie häufig die Stellen übereinstimmen.
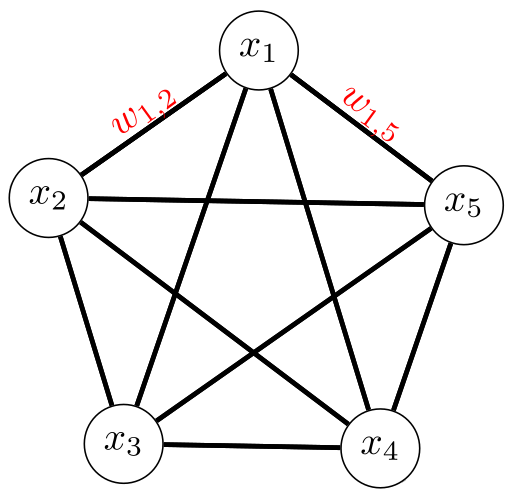
Figure 3: Draft of Hopfield network. Every node is an input node. The McCullogh-Pitts nodes are updated asynchronously. When the state of the node doesn't change any more, they contain the output of the network. Learned are the weights between the nodes. - Boltzmann-Maschine
- Boltzmann-Maschinen sind stochastische neuronale Netzwerke, welche duch belibige ungerichtete Graphen repräsentiert werden können. Die neuronen sind binär; sie feuern also entweder oder nicht. Es gibt insbesondere keine Unterschiede in der Stärke mit der sie feuern. Siehe auch: Scholarpedia
- Restricted Boltzmann machine (RBM)
- Eine RBM ist ein neuronales Netz mit nur einem Hidden Layer.
Es ist gleichzeitig ein Spezialfall von
MRFs.
Im Gegensatz zur Boltzmann-Maschine muss die Restricted Boltzmann-Machine
(RBM) aus einem bipartitem Graph bestehen. Dies erlaubt ein effizienteres
Trainingsverfahren (Contrastive Divergence).
Die Energie des Netzwerkes ist
$$- \sum_{i < j} w_{ij} s_i s_j - \sum_i b_i s_i$$
wobei $s_i, s_j$ die binären Zustände der Knoten $i, j$ sind. Der
Name "Boltzmann" kommt von dieser Energie (man kann den Netzwerkzuständen
wahrscheinlichkeiten zuweisen, die direkt Proportional zu $e^{-E}$)
sind.
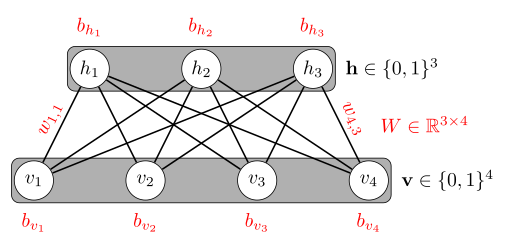
Figure 4: Draft of an RBM. The learned parameters are red.
Siehe A Practical Guide to Training Restricted Boltzmann Machines von Hinton, 2010.
sowie Interence in RBMs
- Contrastive Divergence (CD, CD-$k$, siehe YouTube Video, 2 von Hugo Larochelle)
- Contrastive Divergence ist ein Trainingsalgorithmus für RBMs.
Ein Hyperparameter ist $k \in \mathbb{N}$.
Er geht wie folgt vor:
- Lege den Trainingsvektor $x^{(t)}$ an die Eingabeknoten an.
- Berechne die Wahrscheinlichkeit für jede Hidden Unit, dass diese gleich 1 ist. Setze sie mit dieser Wahrscheinlichkeit gleich 1.
- Berechne die Wahrscheinlichkeit für jeden Eingabeknoten, dass dieser gleich 1 ist. Setze ihn mit dieser Wahrscheinlichkeit gleich 1.
- Gehe zu Schritt 2. Wiederhole dies für $k$ Schritte (dies wird auch Gibbs-Sampling genannt). Das, was nach dem $k$-fachem Gibbs-Sampling in der Eingabeschicht steht wird auch "negative sample $\tilde x$" genannt.
- Update der Parameter: \begin{align} W &\leftarrow W + \eta (h(x^{(t)}) {x^{(t)}}^T - h(\tilde x) {\tilde x}^T)\\ b_h &\leftarrow b_h + \eta (h(x^{(t)}) - h(\tilde x))\\ b_v &\leftarrow b_v + \eta (x^{(t)} - \tilde x) \end{align} wobei $\eta \in (0, 1) $ die Lernrate ist, $b_h \in \mathbb{R}^n_h$ der Bias-Vektor der Hidden Units und $b_v \in \mathbb{R}^{n_v}$ der Bias-Vektor der Eingabeknoten ist. $h = \text{sigmoid}(b_h + W x)$ ist ein Vektor, welcher für die einzelnen Hidden Units sagt wie wahrscheinlich es ist, dass diese gleich 1 sind.
- Simulated annealing
- Simulated annealing ist ein heuristisches Optimierungsverfahren. Sei $D$ ein Wertebereich einer Funktion $f: D \rightarrow \mathbb{R}$ und $U: D \rightarrow \mathcal{P}(D)$ eine Funktion, welche die Umgebung eines Punktes angibt. Sei $T: \mathbb{N}_0 \rightarrow \mathbb{R}_{> 0}$ die Temperatur zum Zeitpunkt $t \in \mathbb{N}_0$. Gesucht ist $\text{arg min}_{x \in D} f(x)$. Wähle zum Zeitpunkt $t=0$ einen zufälligen Startwert $x \in D$. Gehe nun iterativ vor und jeweils einen Zeitschritt weiter: Nehme einen Punkt aus der Umgebung $y \in U(x)$. Wenn $f(y) \leq f(x)$, dann überschreibe $x \leftarrow y$. Falls nicht, dann überschreibe es mit der Wahrscheinlichkeit $\exp \left (-\frac{f(y)-f(x)}{T(t)} \right )$. Speichere in jedem Schritt den bisher besten Wert.


Anwendungen:
- Hopfield-Netze: Hopfield-Netze kann man für das TSP einsetzen und auch als Assoziativspeicher nutzen. Allerdings haben sich Hopfield-Netze nie wirklich durchgesetzt.
- RBMs: Collaborative Filtering
Siehe auch:
- Deeplearning.net: Restricted Boltzmann Machines (RBM)
- A. Barra, A. Bernacchia, E. Santucci und P. Contucci: On the equivalence of Hopfield networks and Boltzmann Machinesin Neural Networks, 2012.
V12: RNNs
Slide name: V12_2015-06-02_RNNs.pdf
- Elman-Netz
- Ein rekurrentes neuronales Netzwerk, bei dem die Ausgabe eines hidden layers im nächsten Zeitschritt als Eingabe verwendet wird.
- Jordan-Netz
- Ein rekurrentes neuronales Netzwerk, bei dem die Ausgabe der Ausgabeschicht im nächsten Zeitschritt als Eingabe verwendet wird.
- Backpropagation through Time (BPTT)
- Ein Trainingsalgorithmus für rekurrente neuronale Netze, bei dem das Netz "ausgerollt" wird. Das rekurrente Netz wird also als unendlich großes nicht-rekurrentes Netz behandelt.
- Vanishing gradient problem
- Das Problem des verschwindenden Gradienten ist eine Herausforderung im Kontext neuronaler Netze, welche mit Backpropagation trainiert werden. Insbesondere bei sehr tiefen oder rekurrenten Netzen kann es passieren, dass der Gradient bei den ersten Schichten sehr niedrig ist, sodass das Netz sehr langsam lernt. Aufgrund numerischer Ungenauigkeit kann dies sogar dazu führen, dass das Netz in den ersten Schichten nicht lernen kann.
- Long short-term memory (LSTM)
- Ein LSTM ist ein Typ eines neuronalen Netzwerks. Das besondere an LSTM Netzen sind "intelligente" Neuronen, welche über Gates bestimmen ob ein Wert gespeichert wird und wie lange.
Siehe auch:
- Andrej Karpathy: The Unreasonable Effectiveness of Recurrent Neural Networks, 21. May 2015.
- Christopher Olah: Understanding LSTM Networks, 27. August 2015.
- Char-Predictor online Demo
- Recurrent Neural Networks Tutorial, Part 1 – Introduction to RNNs
- YouTube: Vanishing Gradient (5:24 min)
- Where does the name 'LSTM' come from?
- Greff, Srivastava, Koutník, Steunebrink, Schmidhuber: LSTM: A Search Space Odyssey. arxiv, 2015.
- Reddit: The Idea of LSTMs
V13: NN learning tricks
Slide name: V13_2015-06-09_NNlearning-tricks.pdf
- Momentum
- In der Update-Regel $\Delta w_{ij}^* (t+1) = \Delta w_{ij} (t+1) + \alpha \Delta w_{ij}(t)$ wird der Term $\Delta w_{ij}(t)$ als Momentum bezeichnet.
Der Skalar $\alpha \in [0, 1]$ gewichtet diesen und ist ein
Hyperparameter.
Siehe auch: Optimization: Stochastic Gradient Descent - Quickprop
- Quickprop ist ein Trainingsverfahren für neuronale Netze. Der Lernalgorithmus nimmt an, dass die Fehlerebene lokal durch eine parabel approximiert werden kann. Das Gewichtsupdate im Schritt $k$ ist demnach vom Gradienten und dem Gewichtsupdate das vorherigen Schrittes abhängig: $$\Delta^{(k)} \, w_{ij} = \Delta^{(k-1)} \, w_{ij} \left ( \frac{\nabla_{ij} \, E^{(k)}}{\nabla_{ij} \, E^{(k-1)} - \nabla_{ij} \, E^{(k)}} \right)$$
- Weight Decay
- Passe die Fehlerfunktion an: $E = MSE + \lambda \sum_{i,j} w_{ij}^2$
- Weight Elimination
- Passe die Fehlerfunktion an: $E = MSE + \lambda \sum_{i,j} \frac{w_{ij}^2}{1+w_{ij}^2}$
- Optimal Brain Damage (OBD)
- Optimal Brain Damage entfernt nach dem Training Verbindungen die sehr kleine $|w_{ij}|$ haben. Besser: Entferne Verbindungen, die geringen Einfluss auf die Fehlerfunktion haben.
- Cascade Correlation (siehe Fahlman und Lebiere: The Cascade-Correlation Learning Architecture)
- Cascade Correlation ist ein konstruktiver Algorithmus zum erzeugen
von Feed-Forward Neuronalen Netzen. Diese haben eine andere Architektur
als typische multilayer Perceptrons. Bei Netzen, welche durch
Cascade Correlation aufgebaut werden, ist jede Hidden Unit mit
den Input-Neuronen verbunden, mit den Output-Neuronen und mit allen
Hidden Units in der Schicht zuvor.
Siehe How exactly does adding a new unit work in Cascade Correlation? - Meiosis Netzwerke (siehe Stephen Jose Hanson: Meiosis Networks)
- Meiosis Netzwerke bauen ein neuronales Netz auf. Sie beginnen mit einer
einzelnen hidden Unit. Diese hidden Unit wird aufgespalten, wenn die
"Unsicherheit" zu groß ist (vgl. paper für Kritierum; vgl. summary).
- Automatic Structure Optimization (ASO, siehe [Bod93])
- Der ASO-Algorithmus passt folgende Hyperparameter im Training
automatisch an:
- Anzahl der Hidden Units
- Größe des Input-Fensers (ASR-Spezifisch)
- Anzahl der Zustände, welche "Accoustic Events" repräsentieren
- Classification Figure of Merit (CFM, siehe [Ham90])
-
$$E_{CFM}(w) = \sum_k \frac{\alpha}{1 + e^{-\beta \Delta_k + \gamma}}$$
wobei
- $k$: Klasse
- $\alpha, \beta, \gamma$: Hyperparameter
- $\Delta_k = o_t - o_k$: Differenz des wahren (true) nodes und des anderen Knotens.
Speed-ups des Trainings sind möglich durch:
- Momentum
- Überspringen von bereits gut gelernten Beispielen
- Dynamische Anpassung der Lernrate $\eta$
- Quickprop
- Gute Initialisierung (z.b. $w \sim U(- 4 \cdot \sqrt{\frac{6}{n_j + n_{j+1}}}, 4 \cdot \sqrt{\frac{6}{n_j + n_{j+1}}})$)
Lernen kann getweakt werden:
- Den Betrag des Gradienten um eine kleine Konstante vergrößern (Folie 19+20)
- Fehlerfunktion anpassen
- MSE
- Cross-Entropy
- CFM
- Overfitting verhindern
- Weight decay
- Weight elimination
- Optimal Brain Damage
- Optimal Brain Surgeon
- Schrittweise Netzkonstruktion
- Cascade Correlation
- Meiosis Netzwerke
- ASO
V14: DNN CV
Slide name: V14_2015-06-10_DNN_CV .pdf
- SIFT (Scale-invariant feature transform)
- Unter SIFT versteht man bestimmte Features in der Bildverarbeitung, welche invariant unter skalierung sind.
- Texton (siehe UCLA)
- Unter einem Texton versteht man grundlegende, kleine Features eines Bildes. Diese Bilden die kleinsten als unterschiedlich wahrnehmbaren Einheiten.
- Convolutional Neural Network (CNN)
- Ein CNN ist ein Neuronales Netzwerk, welches mindestens eine Schicht hat, welche die Parameter eines Kernels für eine Faltung lernt.
- Feature Map
- Im Kontext von CNNs versteht man unter einer Feature-Map die Ausgabe eines Kernels in einem Convolutional Layer.
Facts:
- Pooling: Max, Mean, Probabilistic
V15: Speech-Independence
Slide name: V15_2015-06-17_Speech-Independence.pdf
Visualisierung von Netzen
Häufig wird die Architektur neuronaler Netze grafisch dargestellt. Dabei ist mir folgendes aufgefallen:
- Im Innenren von Neuronen wird die Aktivierungsfunktion "geplottet". Das heißt bei der Sigmoidfunktion wird etwas S-Förmiges dargestellt, bei der sign-Funktion etwas eckiges, bei ReLU ein horizontaler Strich gefolgt von einem Strich im 45-Grad Winkel.
- Typischerweise ist der Input links (oder alternativ unten) und der Output rechts (oder alternativ oben)
Interpretation of errors
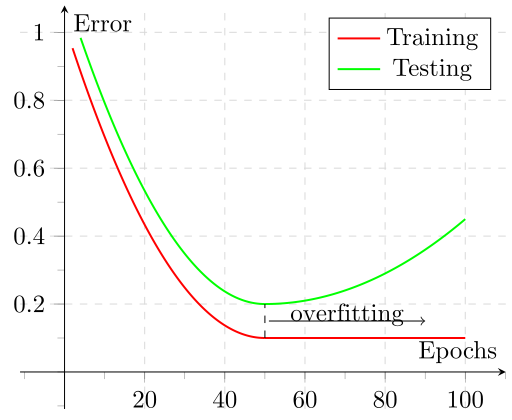
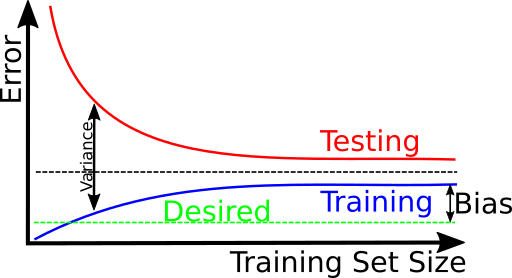
If you have a problem with high variance, you can train more epochs, get more data or better features.
If you have a problem with high bias, you should get better features or a better classifier.
Please note that Figure 6 also gives you a feeling for how much new training data will help you with your problem.
Aktivierungsfunktionen
| Name | Function $\varphi(x)$ | Range of values | Differentiable | $\varphi'(x)$ | Layer | Comment |
|---|---|---|---|---|---|---|
| Signum | $\varphi(x) = \begin{cases}+1 &\text{if } x > 0\\-1 &\text{if } x < 0\end{cases}$ | $\{-1, 1\}$ | Yes (except 0) |
$\varphi'(x) = 0$ | No | |
| Heaviside Step function | $\varphi(x) = \begin{cases}+1 &\text{if } x > 0\\0 &\text{if } x < 0\end{cases}$ | $\{0, 1\}$ | Yes (except 0) |
$\varphi'(x) = 0$ | No | McCullch-Pitts; Rosenblatt |
| Sigmoid | $\varphi(x) = \frac{1}{1+e^{-x}}$ | $[0, 1]$ | Yes | $\varphi'(x) = \frac{e^x}{(e^x +1)^2}$ | No | Smoothed version of the heaviside step function |
| tanh | $\varphi(x) = \frac{e^x - e^{-x}}{e^x + e^{-x}} = \tanh(x)$ | $[-1, 1]$ | Yes | $\varphi'(x) = \text{sech}^2(x)$ | No | Smoothed version of the signum function |
| ReLU | $\varphi(x) = \max(0, x)$ | $[0, \infty)$ | Yes (except 0) |
$\varphi'(x) = \begin{cases}1 &\text{if } x > 0\\0 &\text{if } x < 0\end{cases}$ | No | Standard in CNNs |
| Leaky ReLU | $\varphi(x) = \max(\alpha x, x)$ mit typischerweise $\alpha = 0.01$ | $(-\infty, +\infty)$ | Yes (except 0) |
$\varphi'(x) = \begin{cases}1 &\text{if } x > 0\\0.01 &\text{if } x < 0\end{cases}$ | No | Fixes the dying ReLU problem[1] |
| Softplus | $\varphi(x) = \log(e^x + 1)$ | $(0, \infty)$ | Yes | $\varphi'(x) = \frac{e^x}{e^x + 1}$ | No | Smoothed ReLU |
| ELU | $\varphi(\mathbf{x}) = \begin{cases}x &\text{if } x > 0\\\alpha (e^x - 1) &\text{otherwise}\end{cases}$ | $(-\infty, +\infty)$ | Yes | $\varphi'(x) = \begin{cases}1 &\text{if } x > 0\\\alpha e^x &\text{otherwise}\end{cases}$ | No | |
| Softmax | $o(\mathbf{z})_j = \frac{e^{z_j}}{\sum_{k=1}^K e^{z_k}}$ | $[0, 1]^K$ | Yes | differentiable | Yes | Standard for classification problems as the output can be interpreted as a probability distribution. |
| Maxout | $o(\mathbf{z}) = \max_{z \in \mathbf{z}} z$ | $(-\infty, +\infty)$ | No | - | Yes |
See also:
- Bing Xu, Naiyan Wang, Tianqi Chen, Mu Li: Empirical Evaluation of Rectified Activations in Convolutional Network. arxiv, 2015
- Djork-Arné Clevert, Thomas Unterthiner, Sepp Hochreiter: Fast and Accurate Deep Network Learning by Exponential Linear Units (ELUs). arxiv, 2015.
Topology Learning
Growing approaches
- Fahlman, Lebiere: The Cascade-Correlation Learning Architecture. 1989.
- Hanson: Meiosis Networks. 1990.
- Côté, Larochelle: An Infinite Restricted Boltzmann Machine. 2015
Pruning approaches
- Le Cun, Denker, Solla: Optimal Brain Damage. 1989.
- Hassibi, Stork: Optimal Brain Surgeon and General Network Pruning. 1993.
Genetic Approaches
See also:
Einordnung
Neuronale netze kann man durch folgende Kriterien mit einander vergleichen:
- Deterministisch / Stochastisch: Ist die Aktivierung der neuronen stochastische oder deterministisch?
- Inferenz: Feed-Forward oder Rekurrent? Wie funktioniert die Auswertung?
- Training: Wie lernt man?
- Verwendung: Wo wird das Netzwerk typischerweise eingesetzt?
| Netzwerk | Deterministisch | Inferenz | Training | Verwendung |
|---|---|---|---|---|
| McCulloch-Pitts Neuron | Yes | Feed-Forward | Supervised | Classification of linear separable data |
| Rosenblatt Perceptron | Yes | Feed-Forward | Supervised | Classification of linear separable data |
| Multilayer Perceptron | Yes | Feed-Forward | Supervised (Backpropagation) | Classification |
| CNN | Yes | Feed-Forward | Supervised (Backpropagation + weight sharing) | Computer Vision |
| TDNNs | Yes | Feed-Forward | Supervised (Backpropagation + weight sharing) | ASR |
| LSTM | Yes | Recurrent | BPTT | Mapping sequences (Generating texts, machine translation) |
| SOMs | Yes | Feed-Forward | Unsupervised (competitive learning) | Visualisierung / Dimensionalitätsreduktion: Mapping of high-dimensional data on 2D; CBIR; TSP |
| Hopfield networks | Yes | Recurrent | Unsupervised (Hebbsche Lernregel) | Associative memories, travelling salesman |
| Boltzmann machines | stochastic | Simulated Annealing | Annealed Importance Sampling | (not used) |
| RBMs | stochastic | $p(h_j=1|x) = \text{sigmoid}(b_{v,j} + W_j x)$ $p(x_k=1|h) = \text{sigmoid}(b_{h,k} + h^T W_k)$ |
Contrastive Divergence (CD-$k$) | Collaborative Filtering |
Learning Rate Scheduling
- Fixed: The learning rate doesn't change. This is the standard stochastic gradient descent algorithm.
- RProp
- RMSProp (Root Mean Square Propagation): Slides
- Exponential Decay Learning Rate
- Newbob
- Performance Scheduling
- AdaGrad
There are a couple of publications which deal with LR scheduling:
- Note on Learning Rate Schedules for Stochastic Optimization
- No More Pesky Learning Rates
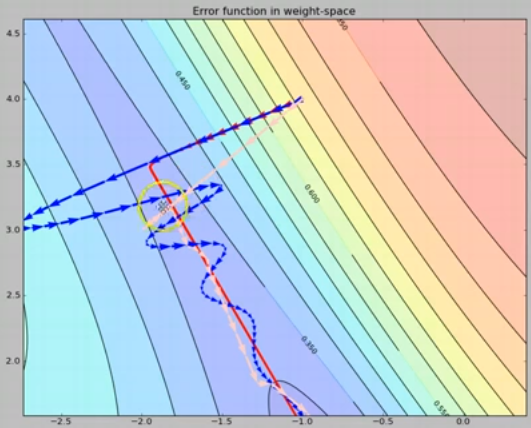
- Optimizing Gradient Descent
I'm not too sure, but I think momentum is not a learning rate scheduling algorithm.
See also:
- What is
lr_policyin Caffe? - Visualizing Optimization Algos 2 on imgur.com by Alec Radford
Prüfungsfragen
- Was ist der Unterschied zwischen Backpropagation und Gradient descent?
→ Backpropagation ist eine geschickte Umsetzung des Gradientenabstiegs, bei der es vermieden wird Berechnungen mehrfach durchzuführen. - Welche Typen von Neuronalen Netzen gibt es?
→ Siehe Einordnung - Welche Aktivierungsfuktionen gibt es?
→ Siehe Übersicht - Welche Aktivierungsfunktionen machen bei einem einzelnen Perzeptron keinen Sinn?
→ Softmax wegen der Normierung; Maxout - Welche Aktivierungsfunktion macht in einem MLP keinen Sinn?
→ Nur lineare, da insgesamt eine lineare Funktion herauskommt. - Wofür kann man neuronale Netze einsetzen?
→ Klassifikation, Funktionsapproximation, Encoding, Dimensionalitätsreduktion, Assoziativspeicher - Welche Möglichkeiten zur Regularisierung gibt es?
→ L1, L2, Dropout, Weight Decay - Wie kann der Standard Gradient descent Algorithmus angepasst werden
um den Lernvorgang zu beschleunigen?
→ Momentum, Exponential Decay Learning Rate, Performance Scheduling, Newbob, AdaGrad, RProp - Welche Alternativen zu standard Gradient Descent gibt es?
→ Quickprop, (L-)BFGS, Conjugate Gradient, Quasi-Newtonian (vgl. Reddit, Optimization Basics). - Wie kann man Netztopologien aufbauen?
→ Meiosis, Cascade Correlation, Optimal Brain Damage / Surgeon (vgl. Reddit).
Material und Links
- Vorlesungswebsite
- NNPraktikum: Toolkit für die Übungsblätter
- StackExchange
- ✓ What is the difference in Bayesian estimate and maximum likelihood estimate?
- ✓ Can k-means clustering get shells as clusters?
- How is the Schwarz Criterion defined?
- Are there studies which examine dropout vs other regularizations?
- How do subsequent convolution layers work?
- ✓ Is Maxout the same as max pooling?
- What is $\alpha \sin(\theta) + \beta \frac{d \theta}{d t}$ in the inverted pole problem?
- ✓ (Why) do activation functions have to be monotonic?
- The cross-entropy error function in neural networks
- What is the “dying ReLU” problem in neural networks? and How does rectilinear activation function solve the vanishing gradient problem in neural networks?
- Visualizing Optimization Algos 2 on imgur.com by Alec Radford
- Neural Network demo
- Skript von Marvin Ritter
- Machine Learning 1 und Machine Learning 2 am KIT
- Coursera: Neural Networks for Machine Learning by Geoffrey Hinton
Literatur
- [Mit97] T. Mitchell. Machine Learning. McGraw-Hill, 1997.
- [Hop82] J. J. Hopfield. Neural networks and physical systems with emergent collective computational abilities in Proceedings of the national academy of sciences, 1982.
- [Kri05] D. Kriesel. Neuronale Netze. 2005.
- [Bod93] U. Bodenhausen und A. Waibel. Tuning by doing: Flexibility through automatic structure optimization in Third European Conference on Speech Communication and Technology, 1993.
- [Haf92] P. Haffner und A. Waibel. Multi-state time delay networks for continuous speech recognition in Advances in neural information processing systems, 1992.
- [Ham90] J. Hampshire and A. Waibel. A Novel Objective Function for Improved Phoneme Recognition Using Time Delay Neural Networks. IEEE Transactions on Neural Networks, 1990.
Vorlesungsempfehlungen
Folgende Vorlesungen sind ähnlich:
- Analysetechniken großer Datenbestände
- Informationsfusion
- Machine Learning 1
- Machine Learning 2
- Mustererkennung
- Neuronale Netze
- Lokalisierung Mobiler Agenten
- Probabilistische Planung
Übungsbetrieb
Übungsblätter sind freiwillig.
Termine und Klausurablauf
Datum: nach Terminvereinbarung
Ort: Gebäude 50.20
Übungsschein: gibt es nicht
Bonuspunkte: gibt es nicht
Erlaubte Hilfsmittel: keine